

汽車搬運機器人控制系統的研究
1 引言
近年來,隨著城市汽車擁有量的不斷上升,停車難的問題也越來越嚴重。為了獲得盡量多的車位,使原本只停一輛汽車的空間能停2~3輛汽車,甚至更多,為了解決城市停車空間的緊張和狹窄問題,各種各樣的立體停車庫和相應的控制系統應運而生。它們在汽車的搬運形式和倉儲方式上,也是多種多樣,其中比較具有代表性的就是采用汽車搬運機器人搬運形式的智能化立體停車庫。
智能化立體停車庫是集各種高新技術為一體的智能化、立體化的汽車儲運系統,它能夠快速、可靠地完成汽車的存取以及相關信息的管理,如停車位、停車時間的記錄,停車費的收取等。立體停車庫可以建在地上,也可以建在地下。此類立體停車庫的核心部件就是汽車搬運機器人,它是一種是集自動化技術、機器人技術、計算機技術為一體的高新技術產品。
為了順應市場的需求,我們研制開發了一種新型的汽車搬運機器人,應用在智能化立體停車庫中。以下對其工作原理和軟硬件設計加以介紹。
2 使用汽車搬運機器人的立體停車庫
2.1 立體停車庫的機械搬運系統
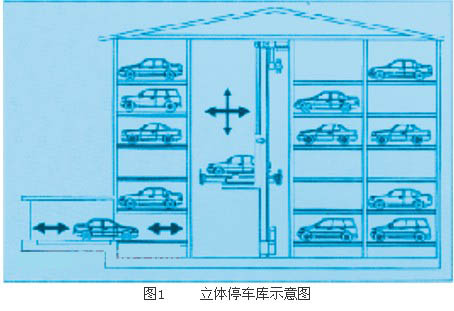
立體停車庫的機械搬運系統一般由運輸平臺、自主引導行走機器人(即汽車搬運機器人)、出入口回轉平臺和快速卷簾門等部分組成。一般在立體停車庫的汽車出入口設有回轉定位平臺,運輸平臺運行于立體停車庫的巷道中,在運輸平臺上配備汽車搬運機器人,形成了一套完整的回轉、運行、升降、交接工作裝置。卷簾門分別設在回轉平臺、出入口的正面及兩個內側,將轉臺與車庫、轉臺與出入口隔離。立體停車庫的布置示意圖如圖1所示。
2.2 立體停車庫的電氣控制系統
立體停車庫的電氣控制系統一般由計算機信息管理系統、出入口控制系統和搬運控制系統等組成。搬運控制系統一般由可編程序控制器構成,包括搬運機器人控制系統和運輸平臺控制系統;出入口控制系統包括主控制器、計算機服務器和汽車停車位姿態檢測系統;信息管理系統包括主計算機、熱備份計算機以及若干臺計算機操作終端。
3 汽車搬運機器人的結構及工作過程
(1) 汽車搬運機器的結構
汽車搬運機器人的外型為扁平長方體,高度為170mm,長寬為1750mm×1430mm。在其4個角上有4個嵌在內部的輪子用來做水平行走,由2臺dc24v/370w的直流電機驅動,行走速度為20m/min。在機器人兩側各有兩組夾持臂,即主夾持臂和輔夾持臂,分別由主、輔臂液壓泵和液壓換向閥門控制其推出和收回。主臂的動作為推出-舉升,輔臂的動作為收回-夾緊,用來抱起汽車的4個車輪,使其抬離地面,從而達到搬運汽車的目的。液壓泵選用意大利hydrapp產品,規格為dc24v/600w,換向閥選用德國bosch公司產品。主臂推力1.2t,輔臂握緊力200kg。機器人的行走定位由安裝于其左、右側面的dmp激光位置檢測器完成。機器人的防撞檢測由安裝于其前、后端的dme激光檢測開關完成。另外,在機器人的前后兩面各有1組條狀的led顯示器,作為汽車搬運機器人運行和故障狀態的監視。
汽車搬運機器人在運行時,根據上位機的控制指令,行走到要搬運的汽車底盤下,伸出其夾持臂,將汽車的4個車輪抬起,運行到目的地后放下。汽車搬運機器人搬運汽車時的運行工況如圖2所示。
(2) 工作過程
汽車搬運機器人的工作過程如下:當入庫車輛在回轉平臺上定位后,汽車搬運機器人依照上位機的指令,自動由運輸平臺駛入入庫車輛底盤下方(運輸平臺是汽車搬運機器人的母體,換句話說,汽車搬運機器人的原位為運輸平臺),夾緊裝置將入庫車輛的4個汽車車輪夾緊,頂起裝置將入庫車輛頂起并抬離地面約3cm,然后由汽車搬運機器人攜帶入庫車輛返回運輸平臺。運輸平臺按主控計算機的運動規劃,運動到預定貨位。汽車搬運機器人從運輸平臺移至指定貨位,汽車搬運機器人的頂起機構收回,將被搬運車輛放下,夾緊機構松開回位。汽車搬運機器人重新回到其母體—運輸平臺,由運輸平臺將汽車搬運機器人送回至出入口,完成1個車輛入庫的動作循環。車輛擺放遵循“就近原則”,以提高搬運效率。車輛出庫時,汽車搬運機器人和運輸平臺的運動順序與上述過程相反。
4 汽車搬運機器人控制系統的硬件設計
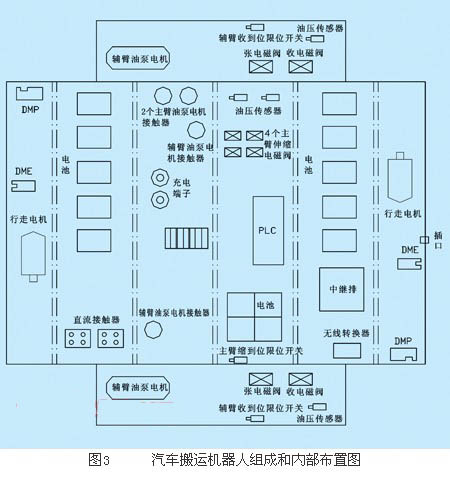
汽車搬運機器人的控制系統集成在機器人本體內,其系統組成和布置圖如圖3所示。搬運機器人內的可編程序控制器通過無線通訊方式與其母體—運輸平臺保持通訊聯絡,運輸平臺再經過紅外通訊與主控計算機通訊,以接受上位機命令并上傳運行狀態。主控計算機負責集中控制和管理汽車搬運機器人與運輸平臺的協調運動。圖3中的無線轉換器采用研華公司的adam4550,它一端接plc的rs-232接口,另一端為2.4g微波信號,它與運輸平臺控制系統中的adam4550一起,構成了在汽車搬運機器人控制系統與運輸平臺控制系統之間的無線數據傳輸線路。
主控制器選用的是siemens公司s7-300系列plc,其硬件系統配置如圖4所示,plc的i/o接線表見附表。

5 汽車搬運機器人控制系統的軟件設計
汽車搬運機器人控制程序的編制充分利用了siemens plc編程軟件step
7提供的軟件平臺,將整個控制程序模塊化。控制程序主要有:主控程序模塊、模擬數據采集模塊、伺服裝置控制模塊、停車貨位參數模塊、液壓裝置控制模塊、故障檢測模塊、顯示模塊和通訊模塊等。以下僅對關鍵的汽車搬運機器人在貨位上取車和放車的控制程序加以介紹。
取車程序流程圖如圖5所示,放車程序流程圖如圖6所示,有關內容說明如下:
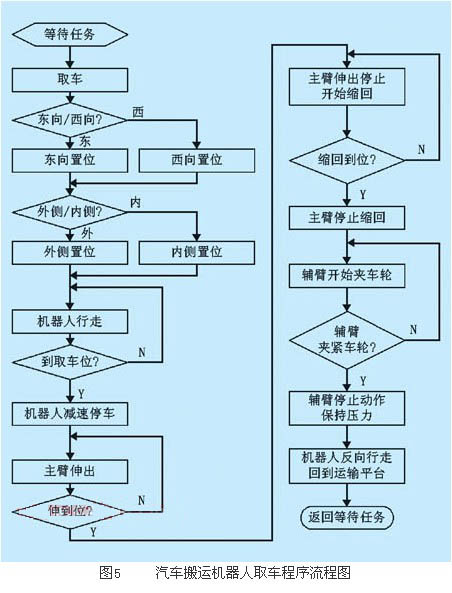
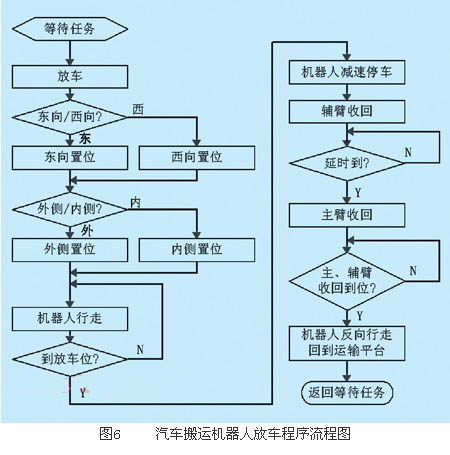
(1)立體停車庫為多層結構,分東、西兩側,每側有若干個汽車貨位,每個貨位空間分為內側車位和外側車位,可以存放兩輛汽車。運輸平臺在停車庫中間巷道沿上下、東西方向行駛,它按照主控計算機的指令,將汽車放置在指定貨位或從指定貨位取出汽車;
(2) 若在東側貨位取(放)車,機器人正向行駛,在西側貨位則反向行駛;
(3)在貨位空間兩側墻壁適當位置上安裝了反光板,它們和搬運機器人上的dmp激光位置檢測器配合,完成搬運機器人在內側車位和外側車位的定位任務;
(4) 主臂的作用是將汽車抬離地面,輔臂的作用是夾緊汽車的4個輪胎,是否夾緊的判斷通過檢測輔臂油缸壓力值的大小來完成。
6 結束語
本文介紹的汽車搬運機器人高度不超過17cm,平面尺寸略大于普通轎車的底盤,在國際上同類產品中占用空間最小、行走速度最快。與其他類型的立體停車庫相比較,采用汽車搬運機器人的停車庫占用空間更小,工程造價更低,存車和取車的速度也更快。
以上介紹的汽車搬運機器人及立體停車庫已經在北京市某地下停車場運行兩年多,整個系統的工作穩定可靠,達到了預期的設計目的。
文章版權歸西部工控xbgk所有,未經許可不得轉載。









 服務咨詢
服務咨詢