

直驅(qū)永磁風(fēng)力發(fā)電機的控制策略研究
1 引言
目前,雖然在整個風(fēng)力發(fā)電系統(tǒng)中,雙饋型風(fēng)力發(fā)電系統(tǒng)仍占主流地位,但是直驅(qū)型發(fā)電機組憑借其固有的優(yōu)勢已經(jīng)開始越來越受到關(guān)注[1]。直驅(qū)型風(fēng)力發(fā)電系統(tǒng)采用風(fēng)輪直接驅(qū)動多極低速永磁同步發(fā)電機(pmsg)發(fā)電,然后通過功率變換電路將電能進行轉(zhuǎn)換后并入電網(wǎng),省去了傳統(tǒng)雙饋式風(fēng)力發(fā)電系統(tǒng)中故障率較高的齒輪箱這一部件,系統(tǒng)效率大為提高,有效地抑制了噪聲,提高了系統(tǒng)的運行可靠性,因而得到了市場青睞。
2 直驅(qū)型風(fēng)電機組變流器拓撲結(jié)構(gòu)
低壓系統(tǒng)中全功率變流器的兩種拓撲結(jié)構(gòu)最簡形式如圖1。

對于主動整流拓撲而言,三相電壓型逆變器取代了不控整流和升壓斬波單元,控制發(fā)電機負載轉(zhuǎn)矩,從而實現(xiàn)對電機轉(zhuǎn)速的調(diào)節(jié)。這種拓撲結(jié)構(gòu)采用雙pwm(pulse width modulation)全功率變流器,能夠?qū)崿F(xiàn)對發(fā)電機的高性能控制,也避免了不控整流和升壓斬波兩級結(jié)構(gòu)給系統(tǒng)增加的復(fù)雜性,減少了發(fā)電機的銅耗和鐵耗,并可調(diào)節(jié)發(fā)電機功率因數(shù)為1,具有較好的發(fā)展前景。鑒于電機側(cè)變流器與電網(wǎng)側(cè)變流器控制策略的側(cè)重點各有不同,本文提出了電機側(cè)變流器和電網(wǎng)側(cè)變流器分開控制的控制方法(系統(tǒng)控制框圖如圖2所示),可以實現(xiàn)對它的有效控制,從而產(chǎn)生高性能的動態(tài)特性。

3 電機側(cè)變流器控制策略
本文通過控制發(fā)電機組的轉(zhuǎn)速來實現(xiàn)最大風(fēng)能跟蹤,使發(fā)電機轉(zhuǎn)速能跟從不斷變化的風(fēng)速,從風(fēng)中獲取更多的能量:當風(fēng)速在額定風(fēng)速以下時,系統(tǒng)進行轉(zhuǎn)速控制的目的是保證機組運行在最大風(fēng)功率追蹤狀態(tài)下;當實際風(fēng)速高于額定風(fēng)速時,受機械強度、發(fā)電機容量和變頻器容量等限制,必須降低風(fēng)輪捕獲的能量,使功率保持在額定值附近,此時槳距角控制需要起作用,以保證機組保持在額定功率附近。
3.1 額定風(fēng)速以下風(fēng)力機最大功率跟蹤算法(mppt)
風(fēng)機輸出的功率大小會隨著轉(zhuǎn)速的變化而變化。對任意一個風(fēng)速,都有一個最優(yōu)轉(zhuǎn)速使得功率最大。因此,風(fēng)機控制的目標是要控制轉(zhuǎn)速使風(fēng)機始終運行在輸出功率最大點。當槳距角一定時,存在一個最優(yōu)的葉尖速比λ使得風(fēng)能利用系數(shù)cp最大,也就是使輸出功率最大。根據(jù)公式,要實現(xiàn)風(fēng)能的最大功率跟蹤,則必須根據(jù)風(fēng)速來調(diào)節(jié)發(fā)電機轉(zhuǎn)速大小,從而維持最優(yōu)葉尖速比。
永磁同步發(fā)電機的電磁轉(zhuǎn)矩取決于電動機的定子電流,對于直驅(qū)風(fēng)力發(fā)電系統(tǒng),采用永磁同步發(fā)電機,沒有增速機構(gòu),因此風(fēng)力機在各種風(fēng)速下的轉(zhuǎn)速就對應(yīng)發(fā)電機相應(yīng)的轉(zhuǎn)速,即ω=ωg,(ω是風(fēng)機轉(zhuǎn)速,ωg為發(fā)電機轉(zhuǎn)速),因此要使風(fēng)力機的轉(zhuǎn)速時刻追隨風(fēng)速保持為該風(fēng)速下的最優(yōu)轉(zhuǎn)速,就是使發(fā)電機的轉(zhuǎn)子轉(zhuǎn)速跟隨風(fēng)速并保持某風(fēng)速下的最優(yōu)轉(zhuǎn)速。發(fā)電機轉(zhuǎn)速控制方式需要先檢測風(fēng)速信號,再通過風(fēng)速—最優(yōu)轉(zhuǎn)速的關(guān)系自尋優(yōu)找到最優(yōu)轉(zhuǎn)速,將最優(yōu)轉(zhuǎn)速作為參考轉(zhuǎn)速輸入到電機驅(qū)動器中,通過速度閉環(huán)系統(tǒng)使發(fā)電機達到最優(yōu)工作點。由于發(fā)電機的速度和電磁轉(zhuǎn)矩有著直接的關(guān)系,因此可將力矩環(huán)節(jié)作為速度環(huán)節(jié)的內(nèi)環(huán)進行設(shè)計。對于永磁電機不需要勵磁電流,定子電流只產(chǎn)生轉(zhuǎn)矩,在旋轉(zhuǎn)坐標系下,永磁電機的電磁轉(zhuǎn)矩te=1.5pψfiq只與q軸電流相關(guān),而與d軸電流無關(guān),所以力矩環(huán)節(jié)的控制可以轉(zhuǎn)化為電流環(huán)節(jié)的控制。于是,只需通過控制q軸電流即可實現(xiàn)發(fā)電機轉(zhuǎn)矩轉(zhuǎn)速的控制。速度控制方式是以電流控制為內(nèi)環(huán),速度控制為外環(huán)的閉環(huán)控制系統(tǒng)。發(fā)電機側(cè)變流器的主要作用是根據(jù)實際風(fēng)速的變化,調(diào)節(jié)輸出電壓信號ug和電頻率fe。根據(jù)永磁電機的矢量控制原理,通過對發(fā)電機轉(zhuǎn)子電流矢量的相位和幅值進行控制即可達到調(diào)速的目的。從永磁電機的轉(zhuǎn)矩公式可以看出,當永磁體的勵磁磁鏈和直交軸電感確定以后,發(fā)電機的轉(zhuǎn)矩便取決于定子電流的空間矢量ig,而ig的大小和相位又取決于id和iq,通過對這兩個電流的控制就可以控制發(fā)電機的轉(zhuǎn)矩。一定的轉(zhuǎn)速和一定的轉(zhuǎn)矩對應(yīng)于一定的id和iq,通過對這兩個電流的控制,使實際id和iq跟蹤指令值i*d和i*q,便實現(xiàn)了發(fā)電機和速度的控制。
4 電網(wǎng)側(cè)變流器控制策略
一般電網(wǎng)側(cè)變流器控制系統(tǒng)需要交流電壓傳感器、交流電流傳感器、直流電壓傳感器來檢測控制量和起保護作用,增加了系統(tǒng)成本,使得整流裝置體積龐大,同時傳感器信號丟失和噪聲的干擾都有可能使系統(tǒng)性能降低。為此研究省略傳感器控制策略很有必要。本文在傳統(tǒng)svpwm方法的基礎(chǔ)上采用虛擬磁鏈來計算角度,無需對交流電壓信號進行檢測,省去了交流電壓傳感器,降低了系統(tǒng)成本,減小了裝置體積,簡化了電路結(jié)構(gòu)。而且對于電網(wǎng)干擾有較強的抑制作用,電網(wǎng)輸入電流的畸變較小,系統(tǒng)具有更好的動、靜態(tài)控制特性。
4.1 虛擬磁鏈的概念
虛擬磁鏈的概念由虛擬電機引出,可將電網(wǎng)側(cè)電源(圖3中虛線部分)看作一個虛擬的交流“電機”,其中的電阻與電感可分別視為虛擬電機定子電阻和定子漏感。

先設(shè)三相電網(wǎng)電壓平衡,同時忽略進線電抗器和線路電阻r。此時αβ坐標系下的三相vsr的電壓方程為:

由式(3)可以看出在估計磁鏈時用到了積分環(huán)節(jié)。積分初值的問題會造成觀測磁鏈的偏差。本文用兩個一階低通濾波器代替積分環(huán)節(jié),消除了偏移,得到的虛擬磁鏈觀測器如圖4。

4.3 瞬時功率的估計
用測得的線電流值和估計的磁鏈值來估算瞬時功率。在復(fù)數(shù)領(lǐng)域,瞬時功率可按下式計算:
p=re(ui*l)
q=im(uli*l)
i*l是il的共軛復(fù)數(shù)。
瞬時有功功率和無功功率可以表示為:
p=w(ψlαilβ-ψlβilα)
p=w(ψlαilα-ψlβilβ)
4.4 引入虛擬磁鏈的svm-dpc控制框圖

圖5是引入虛擬磁鏈的svm-dpc控制框圖。通過測量得到的電流信號和直流側(cè)電壓信號即可估算瞬時功率和磁鏈位置角。系統(tǒng)以直流輸出電壓為外環(huán)控制,輸出電壓與電壓參考值的差值經(jīng)由pi調(diào)節(jié)器調(diào)節(jié)得到參考電流值。將其與輸出電壓一同送入乘法器即可得到有功功率的參考值。同時,將無功功率參考值設(shè)為0,以保證整流器單位功率因數(shù)運行。內(nèi)環(huán)則控制瞬時有功和無功功率,瞬時功率的計算值與參考值的比較偏差經(jīng)pi控制器輸出后,轉(zhuǎn)化到α-β坐標系,將ua和uβ直接送入 pwm調(diào)制模塊來得到開關(guān)信號。
5 仿真分析
為驗證上述控制方法,本文利用matlab/simulink軟件搭建了基于直驅(qū)型風(fēng)力發(fā)電機電機側(cè)以及電網(wǎng)側(cè)仿真模型,分別如圖6和圖7所示,主要仿真參數(shù)見附表所列,仿真結(jié)果如圖8和圖9所示。



永磁同步發(fā)電機參數(shù)為:額定轉(zhuǎn)速n=750rad/min,rs=1.64ω;ld=0.01547h;lq=0.0258h;ψf=0.1848wb;pn=2;te=9.55n·m。
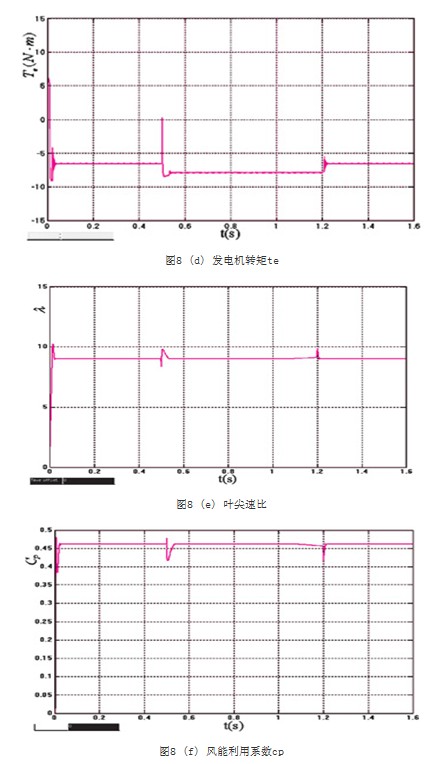
圖8為風(fēng)速在13m/s到14m/s階躍變化時風(fēng)速、發(fā)電機轉(zhuǎn)速、風(fēng)力機輸出轉(zhuǎn)矩、發(fā)電機轉(zhuǎn)矩、葉尖速比和風(fēng)能利用系數(shù)波形。隨著風(fēng)速的變化,d軸電流保持為零,q軸電流隨之調(diào)節(jié),葉尖速比保持最優(yōu)λopt,風(fēng)能利用系數(shù)維持最大值。仿真結(jié)果證明了控制的效果,體現(xiàn)了變速風(fēng)力發(fā)電系統(tǒng)較恒速風(fēng)電系統(tǒng)捕捉能量多且工作穩(wěn)定的優(yōu)點,驗證了發(fā)電機側(cè)的控制算法的可行性。實現(xiàn)了風(fēng)能的最大功率跟蹤,控制策略的穩(wěn)態(tài)和動態(tài)性能得到驗證。
圖9為采用虛擬磁鏈矢量控制系統(tǒng)交流側(cè)a相電壓電流、直流電壓、瞬時有功、瞬時無功的波形。仿真結(jié)果說明在無功給定q*=0時,交流側(cè)電流波形接近正弦,電壓電流同相,實現(xiàn)了單位功率因數(shù)整流運行。有功、無功功率具有較好的穩(wěn)態(tài)特性,p的平均值穩(wěn)定在給定值p*,q的平均值穩(wěn)定在給定值0,系統(tǒng)實現(xiàn)了較好的控制性能。
6 結(jié)束語
本文采用雙pwm變流器作為直驅(qū)永磁同步風(fēng)力發(fā)電機的并網(wǎng)電路,提出了一種電機側(cè)變流器和電網(wǎng)側(cè)變流器分開控制的控制策略。仿真結(jié)果驗證了所提出控制策略的正確性:電機側(cè)在額定風(fēng)速以下時可以很好的通過追蹤最佳葉尖速比來獲取最大風(fēng)能,并穩(wěn)定直流側(cè)電壓;電網(wǎng)側(cè)可以保持網(wǎng)側(cè)功率因數(shù)運行,并且省去了交流電壓傳感器,擁有較好的動、靜態(tài)性能。電機側(cè)和電網(wǎng)側(cè)各司其職,使得控制方法簡單、有效。
文章版權(quán)歸西部工控xbgk所有,未經(jīng)許可不得轉(zhuǎn)載。









 服務(wù)咨詢
服務(wù)咨詢