

風電系統中發電機勵磁控制系統的研究
1 引言
在能源消耗日益增長、環境污染日漸嚴重的今天,在對可再生能源的開發利用中,風能由于其突出的優點而成為世界各國普遍重視的能源,風力發電技術也成為各國學者竟相研究的熱點。風力發電機組包括風力機控制系統和發電機控制系統,其核心技術之一為風力發電機的勵磁控制技術。本文主要是對風力發電系統中的雙饋風力發電機的勵磁控制系統進行探究。

2 變速恒頻風力發電系統機理
在風力發電系統中將雙饋電機定子接到工頻電網上,轉子接到四象限變頻器上,使定轉子同時饋電,所以稱該電機為雙饋電機[1]。交流勵磁變速恒頻風力發電系統如圖1所示[2]。其中:f1、f2分別為dfig定、轉子電流的頻率;n1為定子磁場的轉速,即同步轉速;n2為轉子磁場相對于轉子的轉速即轉差速度;nr為dfig轉子的機械轉速;np為dfig極對數。
由電機學的知識可得到計算公式:

由式(3)知:當dfig的轉速nr變化時,可以通過調節轉子勵磁電流頻率f2來保持定子輸出電流的頻率f1恒定,這就是dfig實現變速恒頻的原理。
由上述分析,可得dfig的運行狀態如下[3]:
(1)當nr
(2)當nr>n1時,dfig處于超同步發電運行,f2<0,轉子電流的相序與定子相反,定子磁場旋轉方向與轉子旋轉方向相反,此時定、轉子均向電網輸出電能;
(3)當nr=n1時,dfig處于同步速運行,f2=0,勵磁變頻器向轉子提供直流勵磁。

3 網側勵磁變換器的設計
前面已經討論了雙饋風力發電機采用雙pwm變換器進行交流勵磁[4],如圖1所示,網側變換器和電機側變換器的主電路結構完全相同,只是工作狀態不同而已。網側變換器采用三相vsr整流器,主要完成以下控制目標:保持輸出直流電壓恒定且有良好的動態響應能力;確保交流側輸入電流波形正弦化,功率因數為1;能量可以雙向流動。

為了完成以上任務,該部分首先建立三相vsr(voltage source rectifier)的數學模型,再采用電網電壓定向的控制方式來簡化控制系統的設計。三相電壓型pwm整流器的電路拓撲結構如圖2所示,主要有交流輸入側三相電壓源為ua、ub、uc;進線電感為la、lb、lc;進線電感的等效電阻為ra、rb、rc,三對全控型功率器件igbt、直流側輸出電容c和可實現能量雙向流動的直流側負載rl和el。
本論文網側變換器控制系統采用雙閉環結構,即外環為電壓環、內環為電流環。
令網側變換器交流側電壓為:
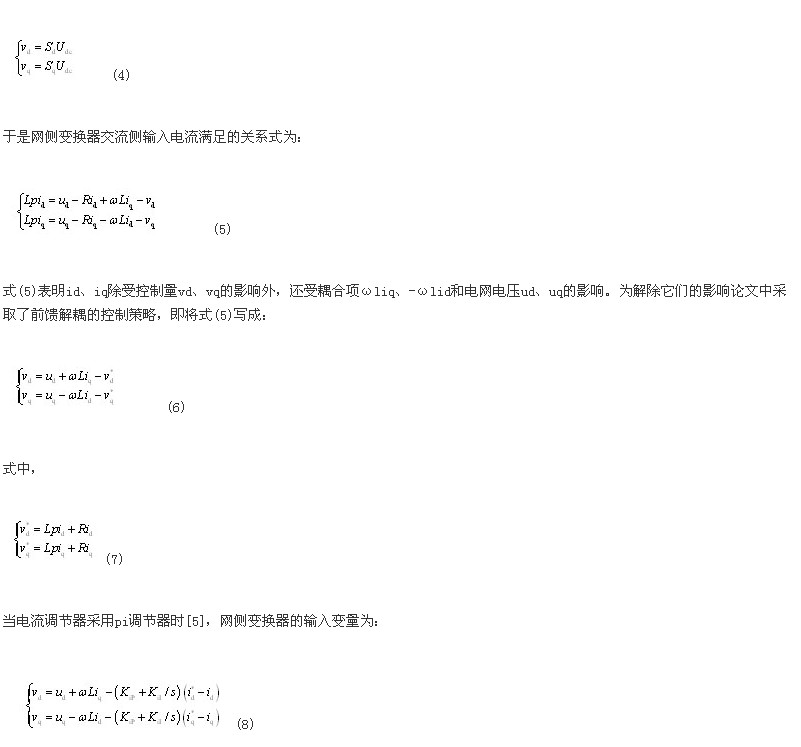
式中,kip和kii為電流內環比例增益和積分增益;iq*和id*分別為電流iq和id的指令值。
綜合以上分析,按照電壓外環、電流內環的雙閉環結構進行設計,可以構建出完整的網側pwm變換器及其控制系統,其原理框圖如圖3所示。

4 轉子側勵磁控制系統
4.1 轉子側最大風能追蹤控制機理
風能是一種具有隨機性和不穩定性的能源。若要使風力機捕獲風能的效率最高且風施加給風力機的機械力較小,應該控制風力發電機組在不同的風速下運行在各自對應的最佳轉速處[6]。采用雙pwm變換器進行交流勵磁的風力發電機組,其運行速度可以改變。在槳距角和風速一定時,風能利用系數cp隨著風力機轉速的變化而變化,從而使風力機輸出的機械功率pmec變化,也就是說,轉速n變化,會導致風力機捕獲風能的效率不同。如圖4為風力機在槳距角β=0°時對應于不同風速下輸出的機械功率。縱坐標為風力機輸出的機械功率,是以其額定功率pnmec為基值的標幺值,pnmec=100kw;橫坐標為風力機的轉速,是以dfig的同步轉速n1為基值的標幺值,n1=1800r/min。

從圖4可以看出,在同一風速下風力機輸出機械功率隨風力機轉速變化而變化,每一種風速下都存在一個最大輸出功率點,對應于最大的風能轉換系數cpmax。將各個風速下的最大輸出功率點連接起來,就可以得到風力機輸出機械功率的最佳曲線,如圖4中曲線pmopt所示。要使風力機運行在這條曲線上,必須在風速變化時及時調節風力機轉速,以保持最佳葉尖速比,此時風力機才滿足最大機械功率輸出。
4.2 轉子側勵磁電源矢量控制系統的設計
定子、轉子繞組電壓方程分別為:

顯然,若將δurd、δurq視為消除轉子電壓、電流交叉耦合的補償項,則u′rd、u′rq分別與ird、irq構成一階慣性環節,實現了轉子電壓、電流解耦控制。這樣做可以在保證控制系統的穩態和動態性能的基礎上簡化控制系統的設計。
綜合以上分析,若按照以發電機輸出的有功功率和無功功率為控制目標,主要包括功率外環和電流內環、磁鏈計算環節和坐標變換環節。若要最大程度地追蹤風能,可以設計出帶有風力機控制子系統的交流勵磁變速恒頻風力發電系統的矢量控制框圖如圖5所示。

5 仿真研究
(1)dfig(繞組折算后)
額定功率pn=110kw,定子額定電壓un=575v(線電壓),額定頻率fn=60hz;極對數np=2;額定轉速nn=1785r/min;定子繞組電阻rs=0.01553(pu);定子繞組漏感:lls=0.0541(pu);轉子繞組電阻rr=0.008913(pu);轉子繞組漏感llr=0.0541(pu);互感lm=2.04(pu);慣性常數h=0.3175;摩擦因數f=0.006613;初始轉差率s=-0.09;定、轉子繞組y/y接法。轉子繞組電阻和漏感均折算到定子側。

(2)風力機
額定輸出機械功率pnmec= 100kw;最大風能系數cpmax=0.48;葉尖速比λopt=8.1。
(3)雙pwm型變換器
額定功率22kw;直流環節電容c=0.06f;直流環節給定電壓un=1200v;進線電抗器l=0.3(pu);進線電抗器的等效電阻r=0.003(pu);開關頻率fs=1620hz。
仿真模型中選擇電壓的基準值為,功率的基準值為pb=110kw,電流的基準值為。
假定電網電壓為恒定的理想正弦交流電。當給定風速vwind=10m/s時,根據圖5可確定風力發電機組的最佳轉速為dfig同步速的1.09倍,此時dfig工作在超同步速發電狀態電網電壓在t=0.035s時突變為原來的0.8倍,在t=0.135s時恢復到起始值,此時的仿真結果如圖6~11所示。

由圖9可見,通過交流勵磁電源的控制,電網電壓突變時dfig轉子轉速仍保持在最佳轉速處。圖10和圖11分別為電網電壓突變時dfig輸送給電網的有功功率和無功功率。顯然,在t=0.035s和t=0.135s時,dfig輸送給電網的有功功率和無功功率產生振蕩,經過交流勵磁電源控制系統的調整作用,最終趨于穩定。
6 結束語
論文中所設計的勵磁控制系統能夠實現風力發電系統的最大風能追蹤和對雙饋風力發電機有功功率和無功功率實現獨立調節。在設計dfig的交流勵磁電源的控制器時,使用雙閉環系統的工程設計方法,其參數自適應性較差。在以后的研究中可以將基于自適應的智能控制算法應用其中,可以得到更理想的效果。
文章版權歸西部工控xbgk所有,未經許可不得轉載。










 服務咨詢
服務咨詢