

一起同步電動機變頻調(diào)速系統(tǒng)故障處理與分析
1 引言
寶鋼三期工程1420冷軋廠的酸軋機組由連續(xù)酸洗線(cpl)和1350mm五機架串列式冷連軋機(tcm)組合而成,該五機架的1、2、3號機架為上、下工作輥傳動的四輥式cvc軋機,4、5號軋機為上、下支撐輥直接傳動的六輥式cvc軋機。該主傳動電機為隱極同步電機,采用了交—交變頻矢量控制系統(tǒng)simadynd,調(diào)速性能優(yōu)越,速度環(huán)靜態(tài)精度為0.01%,調(diào)節(jié)時間為50ms,電流環(huán)調(diào)節(jié)時間為6.5ms。
2 系統(tǒng)概述
五機架主傳動控制柜控制系統(tǒng)主要由整流變壓器、主傳動同步電動機、定子三相繞組供電的交-交變頻器晶閘管柜、轉(zhuǎn)子(激磁)繞組供電的整流晶閘管柜以及simadynd控制柜等組成,如圖1所示。

3 電機屬性
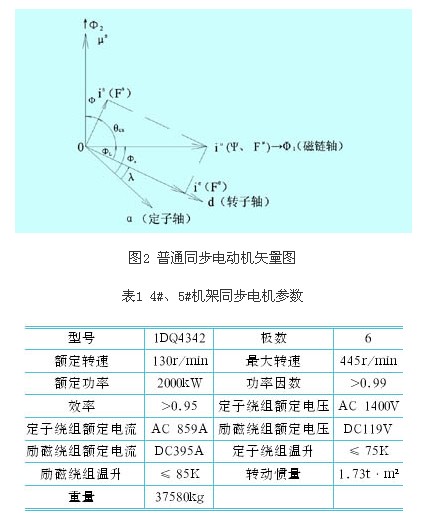
酸軋機組的五機架主傳動電機采用西門子的交流同步電動機,為(轉(zhuǎn)子)直流激磁的隱極同步電機。普通同步電動機矢量圖如圖2所示。4#、5#機架同步電機參數(shù)如表1所示。
4 交—交變頻矢量控制系統(tǒng)原理
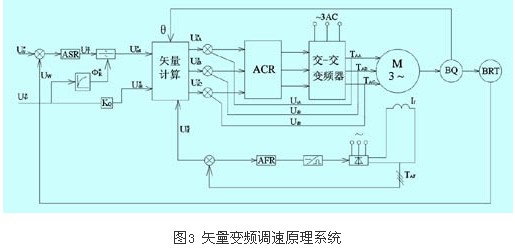
如圖3所示,主傳動矢量控制變頻調(diào)速系統(tǒng)主要包括矢量控制、速度控制、電流控制等環(huán)節(jié),采用了雙閉環(huán)結(jié)構(gòu)形式,轉(zhuǎn)速調(diào)節(jié)器asr的輸出即轉(zhuǎn)矩給定信號,除以磁通模擬信號,得定子電流轉(zhuǎn)矩分量給定信號,將、按功率因數(shù)要求給定的以及來自位置變換器bq的旋轉(zhuǎn)坐標相位角θ等一起輸給矢量運算器,得出定子三相電流給定值、、和勵磁電流。跟隨值iia、iib、iic與給定值、、相比較,送入電流調(diào)節(jié)器acr,由此得出變頻器的控制脈沖,而通過勵磁電流調(diào)節(jié)器afr控制轉(zhuǎn)子勵磁電流if。該矢量控制系統(tǒng)的動態(tài)性能與直流電動機調(diào)速性能相當(dāng),功率因數(shù)接近于1,效率也很高。
5 電壓模型和電流模型控制原理
在矢量控制系統(tǒng)中,磁道檢測包括兩種方式,分別為電壓模型和電流模型。電壓模型是利用測取的定子三相電壓實際值、、直接計算電機磁通ψ和位置角,其中ψ用于磁通閉環(huán)控制,值用于坐標變換,使得矢量控制輸出的是三相電流給定值。電壓模型控制系統(tǒng)如圖4。
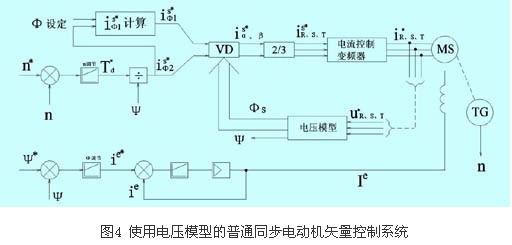
由于電壓模型是通過測得的實際值進行計算的,在低速時(當(dāng)速度在5%以下時)定子繞組電動勢很小,計算誤差大,因此在低速時電壓模型不準確,主要通過電流模型計算ψ和。
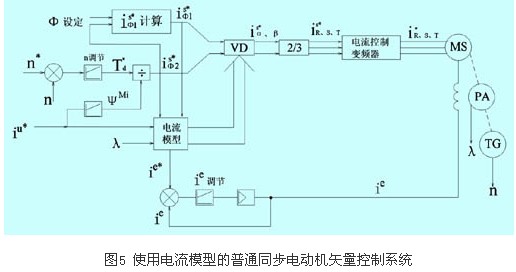
電流模型是根據(jù)定子電流勵磁分量給定值、轉(zhuǎn)矩分量給定值、磁通給定值ψ*以及轉(zhuǎn)子位置角λ,計算出勵磁電流給定值ie*和磁通幅值ψ、磁通位置角。電機低速運行時矢量速度閉環(huán)控制采用電流模型。電流模型控制系統(tǒng)如圖5所示:
在4#機架主傳動控制系統(tǒng)中,矢量控制采用軟件模塊化結(jié)構(gòu),其中實際值檢測處理采用iwe模塊,電壓模型采用umo模塊,電流模型采用imo模塊。當(dāng)電機速度在5%以下時,電流模型imo起作用;當(dāng)電機在滿負荷轉(zhuǎn)速的5%~10%之間運行時,電壓模型umo和電流模型imo同時起作用,磁通值及其位置角取兩者的加權(quán)計算值;當(dāng)電機速度在10%以上時,電壓模型umo起作用。
6 一起主傳動跳電故障處理及原因分析
6.1 故障處理過程
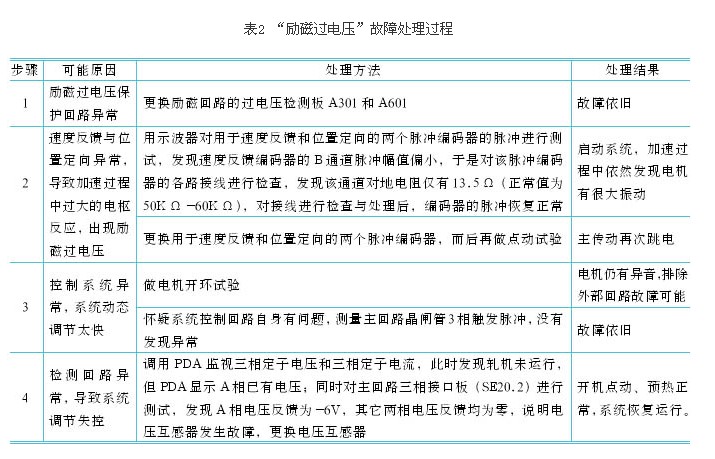
2005年某日,1420冷軋酸軋機組更換4#機架上、下工作輥后,當(dāng)軋機出口速度加速到200m/min時,4#機架下輥主傳動跳電。操作盤op45顯示勵磁直流側(cè)電壓過高,即報“勵磁過電壓”故障,電機速度振蕩。根據(jù)該故障現(xiàn)象,逐步排查可能的故障原因,處理過程見表2。
6.2 故障原因分析
對更換下線的電壓互感器進行檢查,發(fā)現(xiàn)該電壓互感器輸出對正負電源的阻抗相差很大,內(nèi)部電路出現(xiàn)異常導(dǎo)致電壓互感器a相電壓不正常,導(dǎo)檢測回路發(fā)生故障,這是造成4#機架下輥主傳動跳電的根本原因。
在電機低速啟動(速度在5%以下)時,由于不需要用到三相電壓的反饋值以此時電機并沒有跳電。電機轉(zhuǎn)速介于最大轉(zhuǎn)速的5%~10%時,電機由電流模型和電壓模型共同進行控制,并逐步轉(zhuǎn)向電壓模型控制。此時由于電流模型還在起作用,所以電機還沒有失控;但隨著電流模型作用減弱,a相電壓不衡產(chǎn)生的影響越來越嚴重,電機的振動加劇。
當(dāng)軋機出口速度加速到200m/min(最大出口速度為1800m/min)時,4#機架下輥主傳動跳電,也就是在矢量控制系統(tǒng)從電流模型控制轉(zhuǎn)向電壓模型控制以后發(fā)生了跳電。此時,電壓變換器輸出偏大,另外兩相、正常。此時,通過電壓模型計算可知ψ偏大,再經(jīng)過磁通調(diào)節(jié)器和pi調(diào)節(jié),得到電機轉(zhuǎn)子勵磁電流ie變小。當(dāng)轉(zhuǎn)子勵磁電流ie變得足夠小時,轉(zhuǎn)子側(cè)回路近似開路,感應(yīng)出高電壓,導(dǎo)致“勵磁過電壓”跳電。
7 結(jié)束語
在本次故障處理中,有幾個方面值得注意:
(1)霍爾ct、pt內(nèi)部采用電子集成元件,容易出現(xiàn)故障,或發(fā)生輸出零漂,需要定期進行試驗與調(diào)零;
(2)電機開環(huán)試驗是判斷主回路和控制系統(tǒng)是否正常的好方法;
(3)在處理大型的電機故障時,應(yīng)該密切關(guān)注定子的三相電壓和電流以及轉(zhuǎn)子電流,以便盡快從中找出故障的原因。
文章版權(quán)歸西部工控xbgk所有,未經(jīng)許可不得轉(zhuǎn)載。











 服務(wù)咨詢
服務(wù)咨詢