

DDC控制的伺服電機(jī)
隨著大型企業(yè)自動(dòng)化程度越來(lái)越高,對(duì)伺服電機(jī)的要求也在提高,電機(jī)作為自動(dòng)控制系統(tǒng)中的一類重要元件,其可靠性、精度和響應(yīng)快慢直接影響到控制系統(tǒng)的工作性能,是不容忽視的重要環(huán)節(jié)。因此,伺服電機(jī)的ddc有著很高的應(yīng)用價(jià)值和廣闊的應(yīng)用前景。
伺服電機(jī)的傳統(tǒng)控制方法
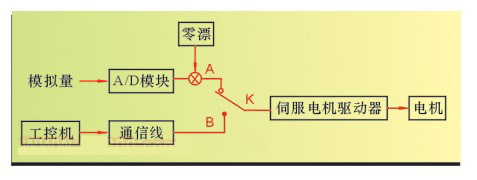
由于外部給定的電機(jī)速度為模擬量,常常需要a/d模塊將模擬量轉(zhuǎn)換成數(shù)字量,伺服電機(jī)驅(qū)動(dòng)器接收到數(shù)字信號(hào)后再控制電機(jī)運(yùn)轉(zhuǎn)。這種傳統(tǒng)的控制伺服電機(jī)驅(qū)動(dòng)器的方法,應(yīng)用時(shí)間長(zhǎng)。但它的可靠性不高,存在一定程度的零漂。同時(shí)考慮到a/d模塊的費(fèi)用,這種方法成本也就較高。
伺服電機(jī)的直接數(shù)字控制
隨著電腦的飛速升級(jí),微軟開發(fā)的windows操作系統(tǒng)和可視化編程工具如:visual basic,visual c++的普及,越來(lái)越多的工業(yè)領(lǐng)域都采用工控機(jī)進(jìn)行自動(dòng)控制。通過(guò)工控機(jī)和下位機(jī)的通信,不僅為操作員提供了友好的人機(jī)界面,而且操作簡(jiǎn)單易學(xué),可靠性不亞于手動(dòng)控制。
伺服電機(jī)的直接數(shù)字控制就是直接利用工控機(jī)和驅(qū)動(dòng)器通信,工控機(jī)通過(guò)串行通信將數(shù)字量傳送給伺服電機(jī)驅(qū)動(dòng)器,從而達(dá)到控制電機(jī)運(yùn)轉(zhuǎn)的目的。由于是數(shù)字信號(hào)直接控制,消除了零漂,可靠性得到了提高。而且,不需要將模擬量轉(zhuǎn)換成數(shù)字量,無(wú)需購(gòu)買a/d模塊,降低了成本。目前許多廠家出產(chǎn)的伺服電機(jī)驅(qū)動(dòng)器都配有通信端口及通信協(xié)議。通信協(xié)議簡(jiǎn)單可靠,用戶可以方便地完成通信程序。這樣可直接在工控機(jī)上控制電機(jī),根據(jù)工藝要求,方便地修改各種參數(shù),從而改變電機(jī)速度等。
應(yīng)用實(shí)例
將伺服電機(jī)的ddc應(yīng)用于sz絞光纖成纜生產(chǎn)線監(jiān)控系統(tǒng),該生產(chǎn)線使用的是panasonic公司的minasa系列的交流伺服電機(jī)驅(qū)動(dòng)器。這種系列的驅(qū)動(dòng)器自帶串行通訊口,并有詳細(xì)的通信協(xié)議說(shuō)明書。工控機(jī)可以直接通過(guò)自帶的com1,com2與驅(qū)動(dòng)器通信。監(jiān)控系統(tǒng)要求達(dá)到的控制要求是:能在工控機(jī)上控制電機(jī),使得電機(jī)能平緩地加速和減速。提供友好的人機(jī)界面,方便地修改參數(shù), 實(shí)時(shí)顯示電機(jī)當(dāng)前狀態(tài)。
·通信協(xié)議
驅(qū)動(dòng)器提供很多參數(shù)號(hào),將各種功能細(xì)分。其中涉及到通信控制的參數(shù)有:
參數(shù)號(hào)05h
內(nèi)外速度控制(內(nèi)部給定為1、外部給定為0)有內(nèi)部給定時(shí)通訊傳送的數(shù)據(jù)才有效, 這是使用通信控制的前提條件。廠家出廠設(shè)置為0。
參數(shù)號(hào)53h
內(nèi)部速度:通信將要求達(dá)到的電機(jī)速度傳送給這個(gè)參數(shù)。
地址:當(dāng)有很多個(gè)驅(qū)動(dòng)器需要通信,可通過(guò)rs2485將它們串起來(lái)。用不同的地址來(lái)區(qū)分,范圍為01h~0fh,在驅(qū)動(dòng)器的表面可以設(shè)置和查看。
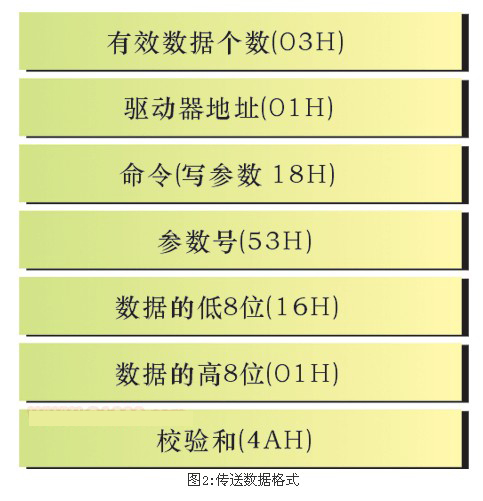
本系統(tǒng)只使用到一個(gè)驅(qū)動(dòng)器,通信用rs2232來(lái)實(shí)現(xiàn),地址為01h。傳送數(shù)據(jù)的格式如圖2所示(以傳送數(shù)值為278為例)。
·軟件實(shí)現(xiàn)
軟件部分是用微軟的面向?qū)ο蠡幊坦ぞ遶isual c++開發(fā)實(shí)現(xiàn)的。microsoft公司在windows提供了一個(gè)串口通訊控件,通過(guò)設(shè)置這個(gè)控件的屬性,就可以簡(jiǎn)單實(shí)現(xiàn)通訊。由于在本監(jiān)控系統(tǒng)是基于文檔而不是對(duì)話框類的,所以先要在oncreate()函數(shù)里創(chuàng)建通訊控件并打開端口即可。
實(shí)測(cè)結(jié)果
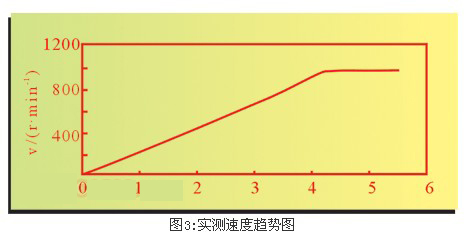
正常生產(chǎn)時(shí),電機(jī)速度為975r/min,啟動(dòng)時(shí)速度變化如圖3所示。從圖3可以看到,速度變化趨勢(shì)呈線性化,滿足生產(chǎn)要求。升速時(shí)間小于6s超調(diào)小,有更高的穩(wěn)定性,誤差小于0.01s。
·利用通訊控制,驅(qū)動(dòng)器直接得到的是數(shù)字信號(hào),不需要進(jìn)行模/數(shù)轉(zhuǎn)換,節(jié)約了一個(gè)a/d模塊,這種方法成本低。
·伺服電機(jī)的ddc的基本思想是直接采用數(shù)字量控制,可以徹底消除模擬量控制帶來(lái)的零漂影響,可靠性得到了很大的提高。
·在工控機(jī)上對(duì)驅(qū)動(dòng)器進(jìn)行控制,通訊時(shí)間最多需要80ms。時(shí)間很短, 驅(qū)動(dòng)器接收到數(shù)據(jù)后可以馬上驅(qū)動(dòng)電機(jī), 符合實(shí)際生產(chǎn)要求。
·根據(jù)廠家的實(shí)際工藝要求,在工控機(jī)上可以靈活地調(diào)整參數(shù)而且可以將電機(jī)控制得比傳統(tǒng)控制要好。通過(guò)通訊,可以人為地控制積分過(guò)程,很好地實(shí)現(xiàn)控制要求。
·伺服電機(jī)的ddc可以方便實(shí)現(xiàn)復(fù)雜的控制算法。通過(guò)模擬量控制是無(wú)法實(shí)現(xiàn)的。伺服電機(jī)的直接數(shù)字控制可廣泛應(yīng)用于各個(gè)領(lǐng)域,控制效果好,提高了系統(tǒng)的可靠性、快速性,有很好的應(yīng)用前景。
文章版權(quán)歸西部工控xbgk所有,未經(jīng)許可不得轉(zhuǎn)載。









 服務(wù)咨詢
服務(wù)咨詢